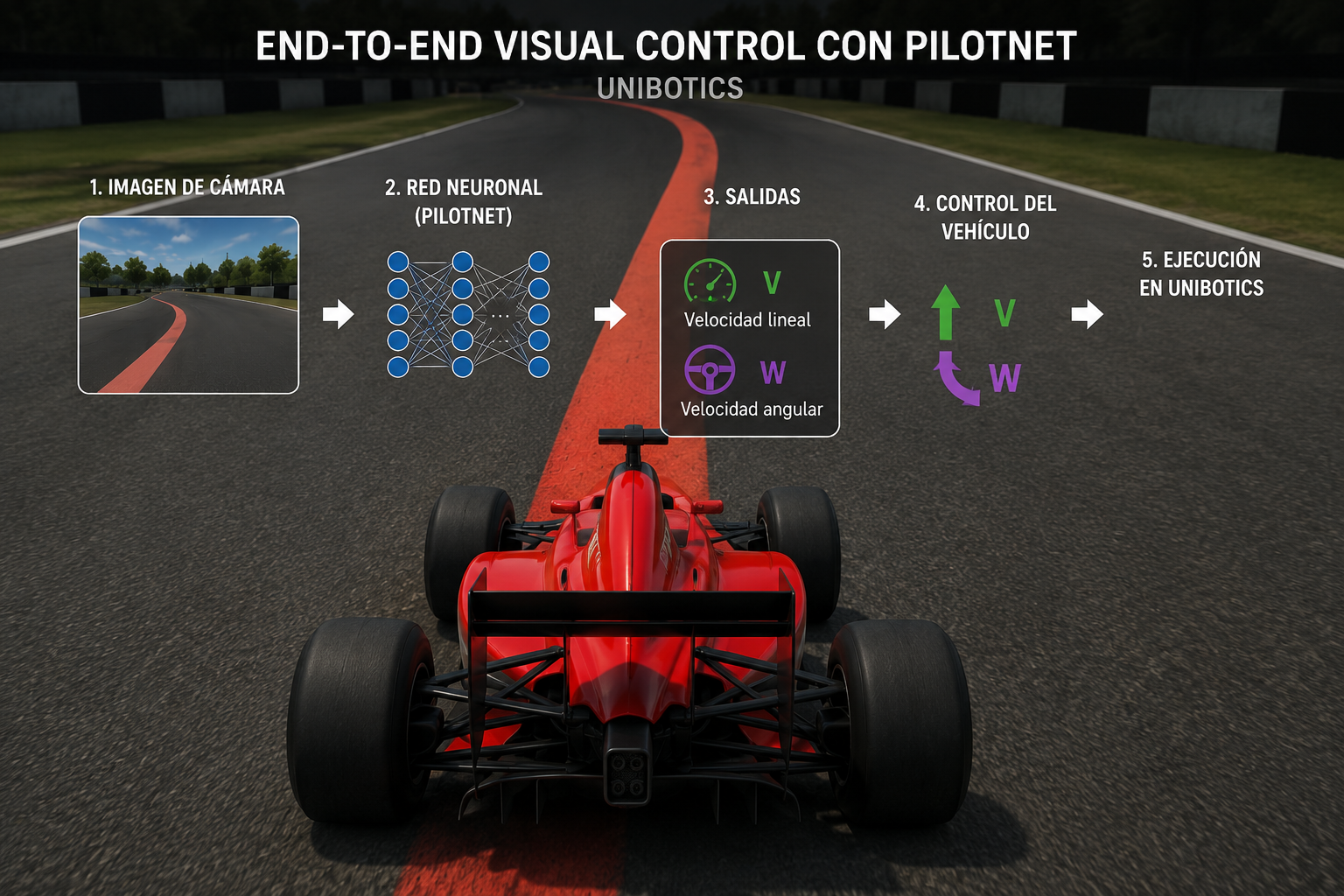
Conducción autónoma end-to-end mediante Deep Learning utilizando PilotNet y ONNX en Unibotics, comparando este enfoque con un controlador clásico basado en visión artificial y PID.
Read More
Localización visual de un robot móvil mediante detección de AprilTags, estimación de pose y fusión con odometría en un entorno simulado.
Read More
Reconstrucción 3D de una escena a partir de un par estéreo utilizando geometría epipolar, matching y triangulación en tiempo real.
Read More
Seguimiento de línea mediante visión artificial y control PID, analizando estabilidad, velocidad y comportamiento en distintos circuitos.
Read More